2020年6月23日9点43分,我国在西昌卫星发射中心成功发射了北斗系统第五十五颗导航卫星,也是北斗三号的最后一颗全球组网卫星。至此,北斗三号全球卫星导航系统星座部署全面完成。

新闻出来之后,国人为之振奋,纷纷点赞转发。社会各界对卫星定位产业的关注度,也冲上了新高。
那么,像北斗这样的卫星系统,究竟是如何实现定位的呢?为了实现更好的定位效果,它引入了哪些关键技术?卫星定位产业的发展,正在进入怎样的阶段?
今天这篇文章,我们就来聊聊卫星定位系统的那些事儿。
首先,我们要知道,北斗和大家更为熟悉的GPS,都属于全球导航卫星系统,也就是GNSS(Global Navigation Satellite System)。
北斗是我们中国自主研发和建设的GNSS系统。而GPS,是美国的GNSS系统,也是全球最早的GNSS系统(开始于1973年,1995年全面投入运行)。
同样具备全球覆盖能力的GNSS系统,还包括俄罗斯的GLONASS和欧洲的Galileo。
除了全球性的卫星系统之外,GNSS还包括一些区域性的系统(例如日本的准天顶系统QZSS和印度的IRNSS),以及增强系统(例如美国的WAAS、日本的MSAS和欧盟的EGNOS等)。增强系统,是基于全球或区域系统的辅助系统,可以满足更多场景需求。

GNSS的类别
GNSS的作用是定位和导航。准确来说,它还有一个普通人不太注意的功能,那就是授时。
学术上对GNSS的定义是这么说的:
全球导航卫星系统,是能在地球表面或近地空间的任何地点,为用户提供全天候的三维坐标、速度以及时间信息的空基无线电导航定位系统。
看明白了吧,三维坐标、速度、时间信息,是GNSS的必备功能。这三个信息,我们通常称之为PVT(Position Velocity and Time)。
值得一提的是,咱们国家的北斗系统还有一个独特的功能,那就是短报文(也就是文字信息)。在关键时候,这个功能可以发挥很大的作用。
那么,GNSS是如何帮助用户获取PVT信息的呢?
我们来做一个非常简单的立体几何数学题。
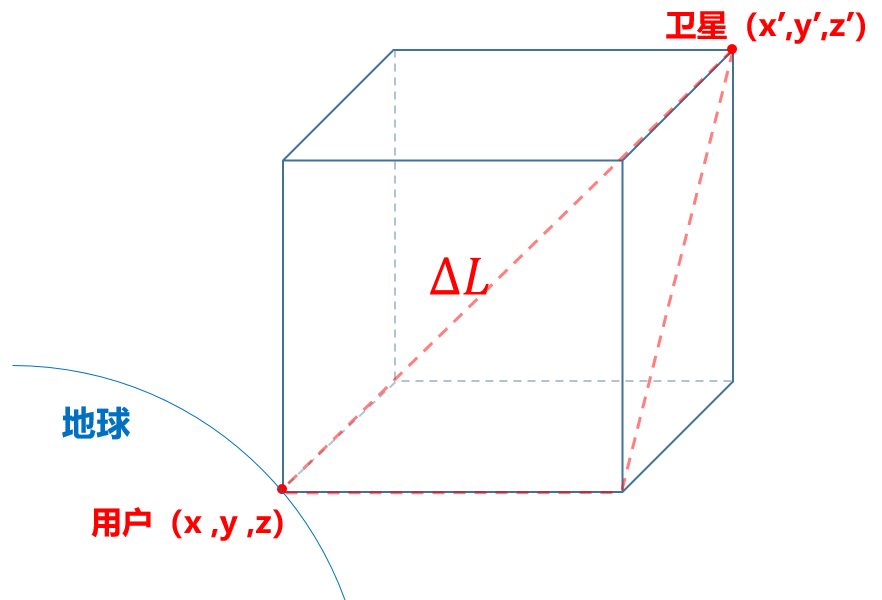
众所周知,地球表面的任何一个位置,都有它的三维坐标,也就是经度、纬度和高程。它头顶上的GNSS卫星,也有自己的三维坐标。
那么,我们把整个空间看成一个坐标系,可以画一个立方体。立方体的两个对角,分别是用户和卫星,如下:
根据中学立体几何的知识,我们可以知道,卫星和用户之间的距离△L(这个距离也被称为“伪距”),是:

卫星的坐标是(x’,y’,z’),这是已知的。用户的坐标是(x,y,z),这是未知的。
与此同时,卫星可以给用户终端发信号,信号的传输速度基本上几乎等同于光速c。而卫星上面有精度极高的原子钟,所以知道自己的时间是t。假设用户终端的时间是t’,那么,卫星和用户之间的距离△L,又可以通过下面这个公式算出:
两个公式一合并,就变成了:

一个公式里有4个未知数(x,y,z,t),大家都懂的,这个公式是解不出来滴。
怎么才能解出来?再列三个公式呗。
也就是说,再找3个卫星的坐标值,组成4个四元方程,就OK了。
这就是为什么,一个用户终端要想解算出自己的准确位置,必须要有至少4颗卫星。
很简单的数学知识,不难理解吧?
虽然GNSS的工作原理看似简单,但真正想要把这个系统做好,是非常困难的。
衡量一个GNSS系统是否足够优秀,主要看它的精度、速度和灵敏度。这个速度,主要是指从启动定位设备到首次正常定位所需的时间,也称为TTFF(Time to First Fix)。

影响GNSS定位精度的主要原因,是误差。误差既来自系统的内部,也来自外部。例如穿透电离层和对流层时产生的误差,还有卫星高速移动产生的多普勒效应引起的误差,以及多径效应误差、通道误差、卫星钟误差、星历误差、内部噪声误差等等。
这些误差,有些是可以完全消除的,也有些是无法消除或只能部分消除的。消除水平的高低,直接决定了系统的准确性和可靠性。
为了更好地消除误差、提高反应速度,GNSS会引入一些天基或陆基的辅助手段。结合辅助手段的GNSS,也被称为A-GNSS。A就是Assisted,“辅助”的意思。
现在比较常用的,是通过陆基的移动通信网络,传送增强改正数据,提供辅助信息,加强和加快卫星导航信号的搜索跟踪性能和速度,缩短定位时间,提高定位精度。

A-GNSS系统架构
除了A-GNSS之外,GNSS还引入了一些关键技术,帮助提升系统性能。
首先是RTK技术。
RTK(Real-time kinematic),称为实时动态差分法,又称为载波相位差分技术,是实时处理两个测量站载波相位观测量的差分方法,包括传统RTK和网络RTK。
传统RTK模式,只有一个基准站。网络RTK模式,有多个基准站。
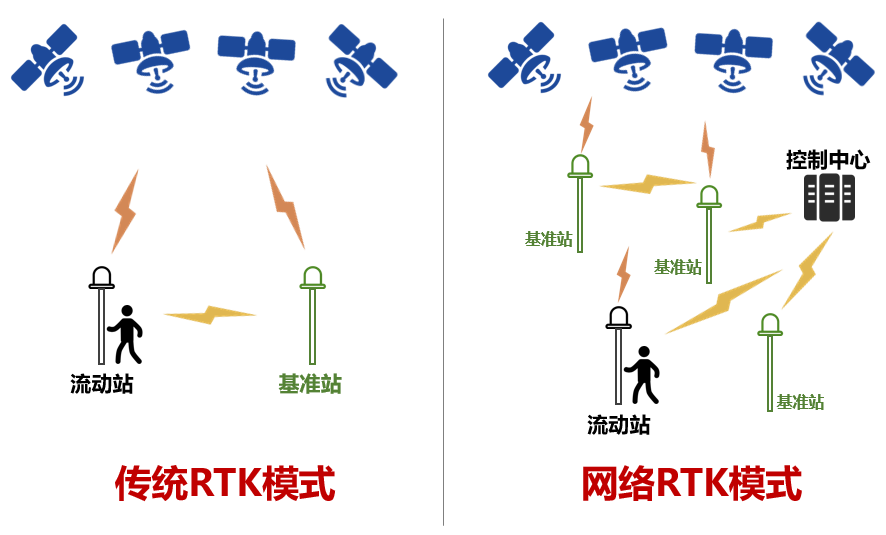
以网络RTK为例,多个基准站会采集监测数据发给控制中心,控制中心针对数据进行粗差剔除后,再进行解算,并最终将改正信息发给用户。
网络RTK的覆盖范围很快,可以距离用户上百公里。而且,网络RTK拥有更高的精度和稳定性。
然后是惯性导航技术。
GNSS卫星定位虽然方便,但容易受客观条件的影响。例如隧道、森林等路段,GNSS信号容易中断。此时,就需要临时采用其它的辅助手段。

航位推算(DR,Dead Reckoning),就是一种自主式的惯性导航技术。通过采用加速度传感器和陀螺仪传感器,结合一些专用算法,它可以根据用户终端(例如车辆)的初始位置信息以及传感器获得的信息,推算出用户终端在盲区位置的高精度导航数据。
DR和GNSS有很强的互补性,一方面DR可以帮助补盲,另一方面GNSS也能对DR进行实时纠偏,帮助DR推测出更准确的位置。
此外,就是双频技术。
所谓双频,很好理解,就是GNSS模组同时支持多个不同GNSS系统的不同频段,以此增强信号的接收能力。

四大导航系统工作频率表
在众多黑科技的加持下,GNSS系统目前已经具备极高的响应速度和定位精度,也有非常可靠的稳定性。行业主流GNSS模组的TTFF速度目前已经提升为秒级,定位精度也从十米级、米级提升为亚米级、分米级甚至厘米级。
这些指标已经完全能够满足大部分的行业应用需求。例如交通、水利、减灾、海事、勘探、建筑等领域,现在都在大量使用GNSS模组。
上述场景中,应用最为广泛且最值得关注的,是车载GNSS模组的应用。

随着“万物互联”时代的到来,车联网作为核心应用,正在进入爆发期。
虽然我们总是强调5G对车联网的重要意义,但不可忽视的是,GNSS定位导航服务,同样是车联网发展的必备条件。
试想一下,如果没有高性能GNSS车载模组的支持,车辆连自己的准确位置信息都不知道,可以说是寸步难行。
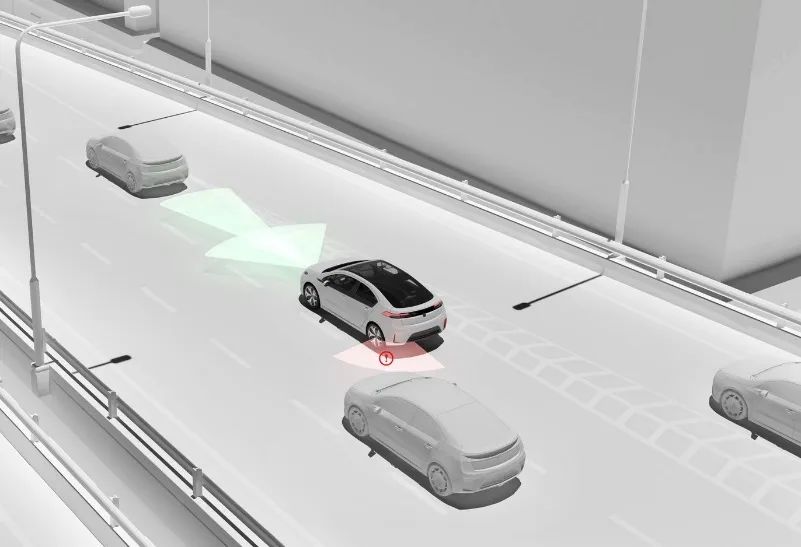
GNSS车载模组能够为自动驾驶、远程驾驶提供了可靠的定位、导航和测距数据来源,是ADAS(高级驾驶辅助系统)不可或缺的组成部分。
除了保障正常驾驶之外,GNSS车载模组还可以用于车辆防盗、紧急救援、集群调度、车队管理等应用需求。

对于企业来说,车辆是重要的运营资产。车辆的位置信息,是重要的管理数据。
GNSS车载模组可以帮助企业掌握实时数据,跟踪车辆位置,更有效地管理这些资产。对于一些特种车辆,例如危险品运输车,GNSS车载模组的重要性更是不言而喻。
目前,物联网模组行业龙头移远通信已有多款车规级GNSS车载模组投入市场,包括LG69T/L26-DR/L26-T/L26-P等多个型号产品,均取得了不错的反响。
移远通信车规级双频高精度定位模组LG69T,支持RTK和DR技术,在大型整车厂及Tier 1客户中备受青睐。该模组严格按照IATF 16949:2016汽车行业质量管理体系标准而制造,其关键器件符合AEC-Q100标准要求,可同时接收多个GNSS卫星信号,并在数秒内收敛到厘米级定位精度——在开阔环境下,可以输出精度5厘米的定位数据。即使在诸如城市峡谷等复杂环境中,LG69T也可实现亚米级精度,全面提升定位性能。据悉,LG69T有望最早在2021年量产的车型中投入使用。
移远通信L26-DR支持DR惯性导航技术,集成了6轴传感器和GNSS算法引擎,具备出色的融合定位性能,可在隧道等无GNSS信号环境下实现1-2米定位精度,为追踪器、T-Box、车载导航、车队管理、物流信息管理等等汽车、工业和消费类应用提供了理想选择。
经过数十年的发展,GNSS系统从当初的GPS一家独大,到现在变成GPS、北斗、GLONASS、伽利略等多系统共存,可以说是取得了长足的进步。如今的GNSS系统,已经具备提供全方位、全天候、高精度、高速率定位导航服务的能力。
GNSS变成了重要的国家级数字化基础设施,对推动数字经济发展有重要意义。围绕GNSS,目前已经衍生出了一系列具有增值潜力的服务场景。越来越多的公司企业,正在加入GNSS的上下游产业链。
GNSS,未来可期!
—— The End ——
点“在看”给中国芯加油!







发表评论 取消回复